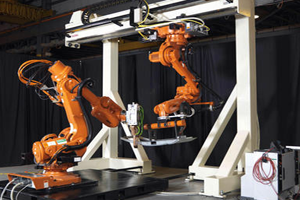
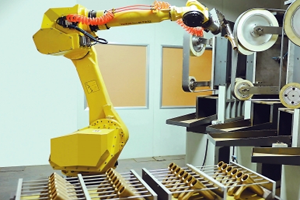
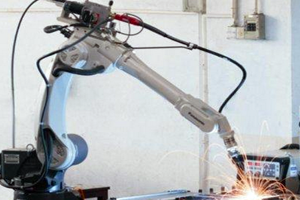
点焊机器人(spot welding robot) 用于点焊自动作业的工业机器人。是由机器人本体、计算机控制系统、示教盒和点焊焊接系统几部分组成。点焊机器人一般具有六个自由度:腰转、大臂转、小臂转、腕转、腕摆及腕捻。点焊机器人的驱动方式有液压驱动和电气驱动两种。同时液压点焊机器人各关节的运动是靠液压油缸驱动的,电动点焊机器人是用直流伺服电机驱动或交流伺服电机驱动的。因此,点焊机器人多数是电动,并且对于不同生产要求及产品的改型换代具有很大的柔性和适应性。在点焊焊接系统中包括点焊焊机和点焊焊钳两部分,而且机器人本体和点焊焊接系统在计算机的控制下构成了点焊机器人系统。
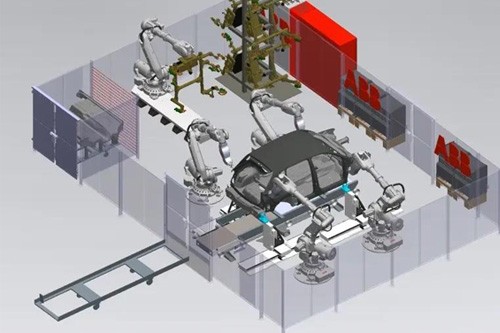
点焊机器人目前广泛使用在汽车制造、电子、模具、机械等各个部门,当前主要设备提供商有发那科(FANUC)、ABB集团(阿西布朗勃法瑞)、库卡(KUKA)等国际知名品牌。












































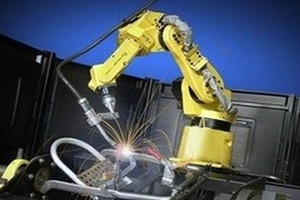







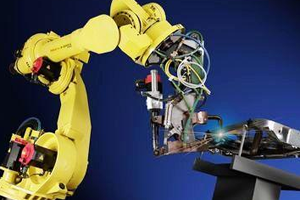








通过轻量化的手臂和最新的控制技术大幅度提高了动作性能,从而大幅度提高了生产效率。
要求提供
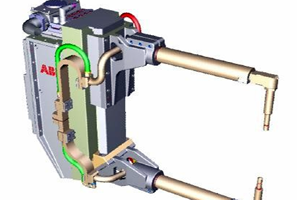
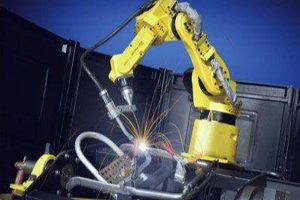
能够提供以点焊改良电缆手臂为代表的多种多样的可选配置,从而满足用户的各种要求。
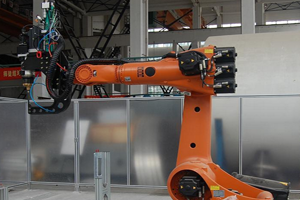
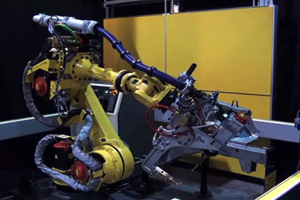
控制系统的性能
使用最新的机器人控制装置R-30ib,通过使用电力再生可选配置及小型化的控制装置,可以实现节能、节约空间。